Soft robotic
Soft robotics is a sub-field of robotics that deals with non rigid robots constructed with soft and deformable materials like silicone, plastic, fabric, rubber, or compliant mechanical parts like springs. Soft robots can actively interact with the environment and can undergo “large” deformations relying on inherent or structural compliance due to their softness and other morphological features.






The idea of my soft robotic
I have a dream that I want to go down the sea to take some picture, so I think if my robot can swim down the sea. I can see around the world of the sea.
Idea Inspiration
|
|
ここをクリックして編集する.
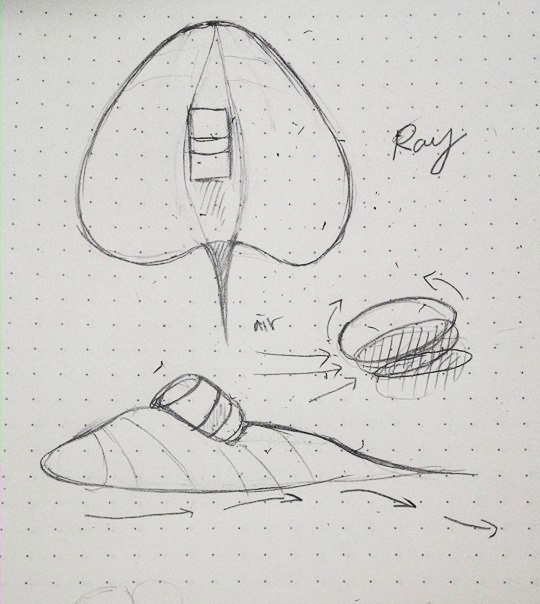
My idea inspiration is Ray. Why is ray? Because the physical characteristics of the ray swim in the sea free and easy. So I want my robotic like ray. |
Sketch
https://www.youtube.com/watch?v=-D_XrRo0h20
CT Scanning
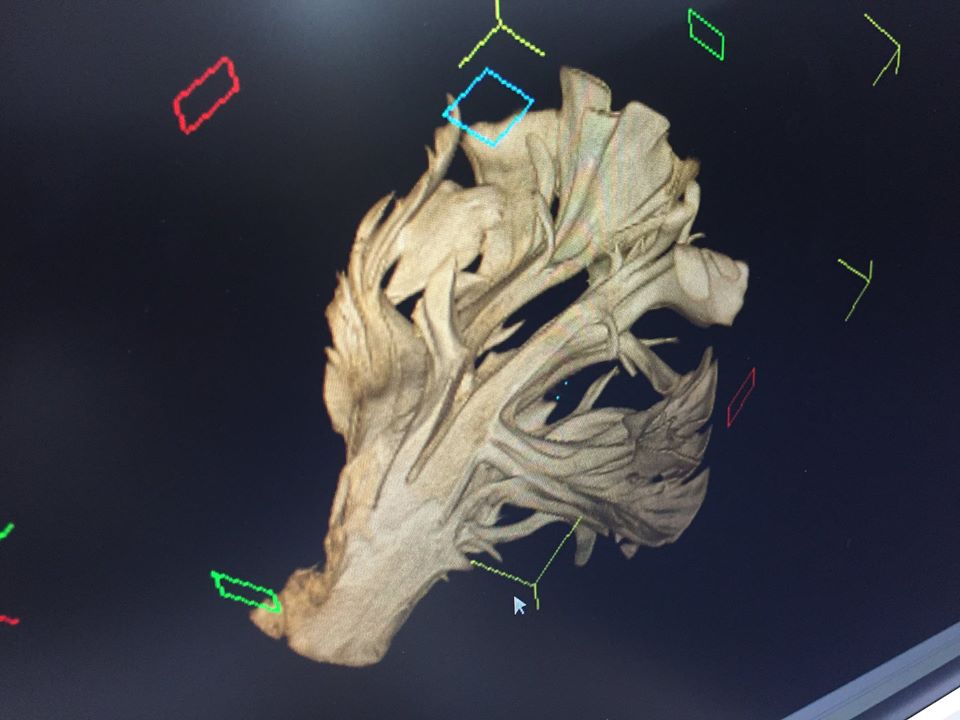
CT scan makes use of computer-processed combinations of many X-ray images taken from different angles to produce cross-sectiona.
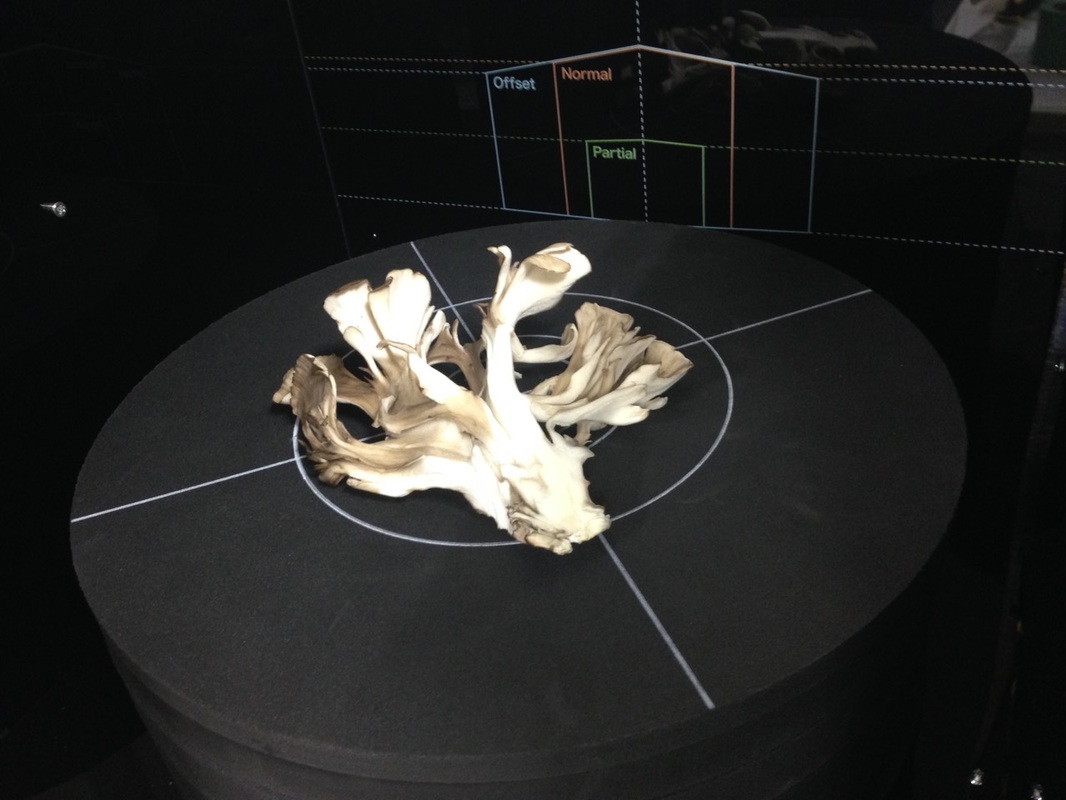
The mushroom which I scanPut the mushroom in CT scan
|

Set upEnter number which is electricity power, then test it.
|
FinishCheck the data.
|
The Principles of CT Scaning
First, the X-ray is generated by the X-ray tube. These different intensities of X-ray is absorbed and measured by the detector. The Detector will turn X-ray into different size of Current and zoom out, then pass these information to the computer. After X-ray scan something in 360-degrees, The computer will be able to collect the information and calculated into points of the X-ray attenuation value on the surface. The point is called voxel. The computer make different degree of grayscale to represent the point, then combine all pixel. It will became a image.
|
Why does CT Scaning help my soft robotic? What I learn from it?
|
What did I scan? Why did I scan it?
I scaned for mushroom, flatfish, Shrimp and orange. Why I scaned for mushroom and flatfish? My soft robotic imitate for Ray. But....I finded the ray, so I bought some mushroom which shape looks like ray. The flatfish function also like ray. That's why I scaned these thing.
|
|
If you want to print it out. Please set up RoiPinter in computer. Then, open the file which you scan. Click "Region growing" which is in" ModeSwitch ". Modeling your thing. Click " Mask ID " to fill the hole which inside your model. If you want to change the shape of the model. You can edit it in Meshlab.
|
Sculptris
It is a software about 3D sculpture. This software can help me sculpture the modeling of soft robotic. This is the practice about Sculptris.
It is my first time to use this software . So, I spent a lot of time to make this dragon and I like this software because it's easy to understand how to use. It's also can make a detail easily on the modeling.
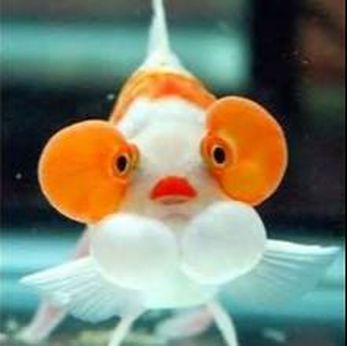
These are three kinds of goldfish which are Comet goldfish , Blister goldfish , Fantail goldfish.






Soft robotic
This is my ideal soft robotic for this time. The space like octopus. It can catch something. I think it's insteresting and useful.
We used silicone 30.

This is the model which made by 3D printer.


This is the final thing that I made. My ideal one is it can take something out.

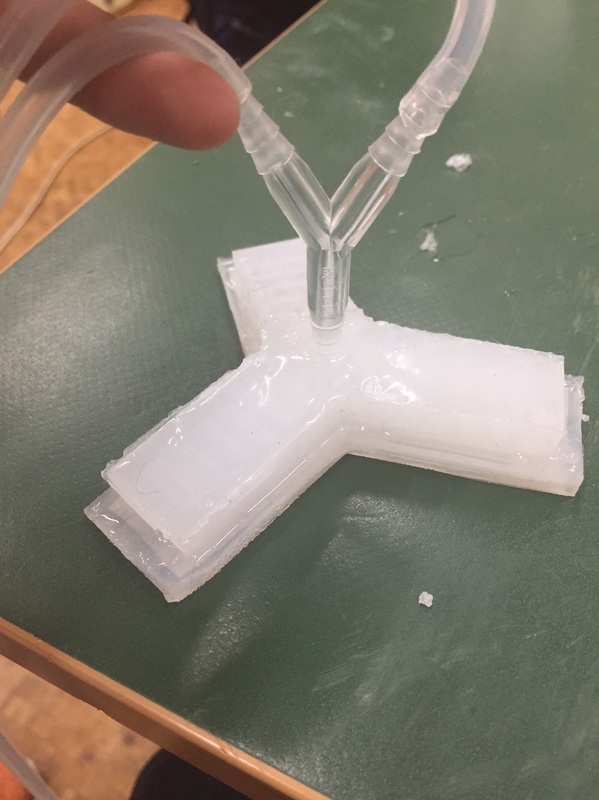
This one is the test that the ray can movie and swim. but I think it's not strong to let it movie. Maybe I can try different type of this.

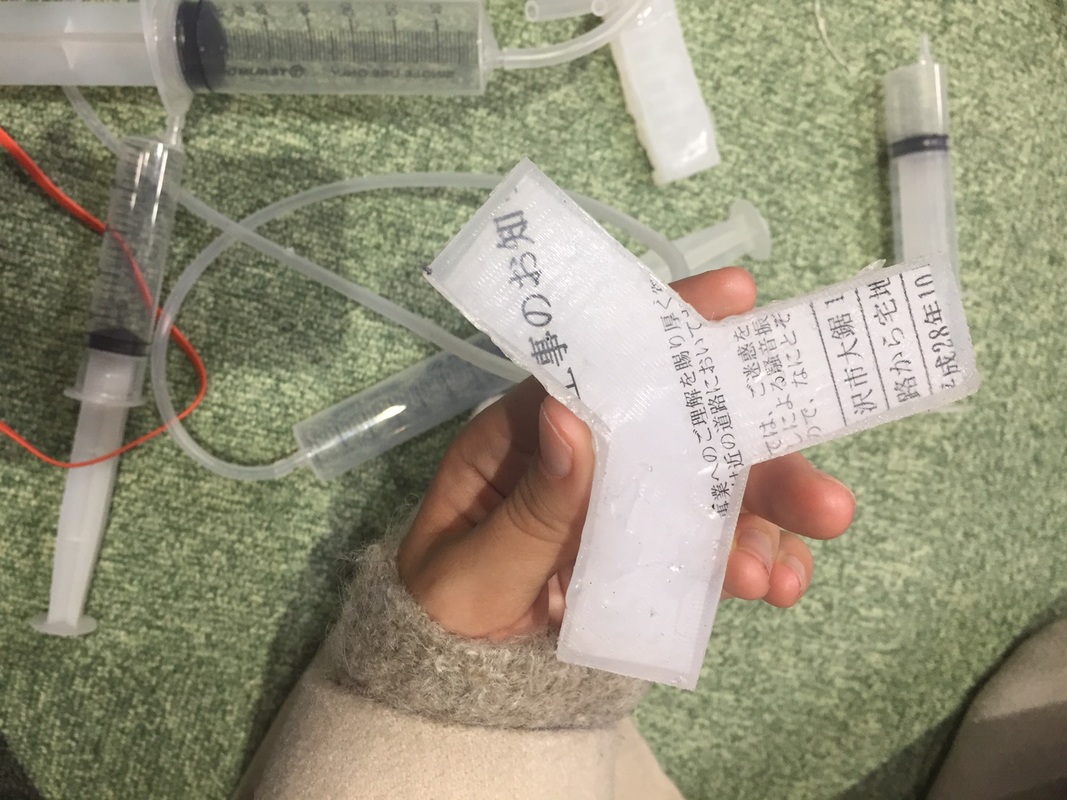
This is my soft-robotic model made by 3D printing.

I put the paper in silicone. When the air it can be winding easily.
Final project
Idea Inspiration
|
The Blister goldfish is my idea inspiration. When I see this fish. I think of soft robotic. Because the blister looks like silicone which is blowed up. |
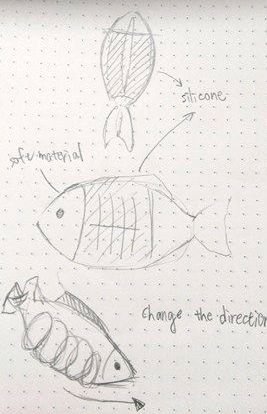
Sketch
I want to make a fish which can swim in water. the body's material is soft, and the fish's skin is silicone. It can change the direction when the silicone blow up. |
|
